Integrated sensing and communications (ISAC), a key enabling technology for 6G systems, leverages shared radio resources and hardware to realize the functions of sensing and communication. As an example of an application that can benefit from ISAC, consider the inter-vehicle communication scenario in Fig. 1. In it, a car wishes to send a message to a second car, while also enabling the latter to detect the presence of a possible target, e.g., of a pedestrian. While conventional systems would use two separate radio resources for data transmission and radar detection, ISAC solutions reuse the same transmitted waveform for the dual role of carrier of digital information and radar signal [1]. A natural radio interface to serve this dual function is impulse radio (IR), also known as ultrawideband (UWB). In fact, IR encodes information in the timing of pulses, which can in turn be repurposed for radar detection [2].

Fig. 1. Illustration of a neuromorphic ISAC system, in which the same IR (or UWB) signal is used for transmission and radar detection of the presence of a target. The key novel element is the use of neuromorphic computing at the ISAC receiver to simultaneously demodulate digital data and provide an online estimate of the presence or absence of the radar target.
Neuromorphic sensing and computing are emerging as alternative, brain-inspired, paradigms for efficient data collection and semantic signal processing [3]. The main features of this technology are energy efficiency, native event-driven processing of time-varying semantic sources, spike-based computing, and always-on on-hardware adaptation [4]. Neuromorphic processors, also known as spiking neural networks (SNNs), are networks of dynamic spiking neurons that mimic the operation of biological neurons. When implemented on specialized — digital or mixed analog-digital — hardware or on tailored FPGA configurations, SNNs have minimal idle and operating energy cost, and consume as little as a few picojoules per spike [5].
The integration of IR and neuromorphic computing was investigated in our recent works [6, 7], which proposed an end-to-end neuromorphic architecture for remote inference that replaces traditional digital blocks with SNNs as encoder and decoder.
Our work
With the aim of reducing energy consumption and facilitating online and always-on operation on specialized hardware, as illustrated in Fig. 1, we propose to leverage the synergy between IR transmission and neuromorphic computing to realize efficient ISAC systems. The neuromorphic ISAC (N-ISAC) receiver is able to leverage spiking neural network (SNN)-based processing to demodulate digital information and detect the radar signal.
As illustrated in Fig. 2, we consider an ISAC system in which digital communication and radar sensing leverage the same IR transmitted signal. In order to efficiently and simultaneously decode the digital data and detect the possible presence of a target at a known delay cell, the receiver processes the received signal via an SNN. Technical details can be found in our paper at this link.

Fig. 2. N-ISAC: Digital data is transmitted by an IR transmitter via pulse-position modulation (PPM); while the receiver simultaneously decodes digital data, and performs radar detection by means of an SNN, which can be efficiently implemented on neuromorphic hardware.
Result
We compare the proposed N-ISAC system with a conventional separate sensing and communications (SSAC) scheme, which divides the transmission slots into slots used for transmission and slots used for sensing. For SSAC, two SNNs are implemented at the receiver, one performing data decoding for the transmission slots, and the other responsible for radar sensing in the sensing slots.
To evaluate the performance of our system, we adopt the following performance metrics for data transmission and radar sensing: 1) Normalized test throughput, i.e., the ratio of the average number of correctly decoded bits over the total number of time slots; 2) Radar test detection error, i.e., the probability that the sensing decision is not correctly taken upon processing all time slots.
In Fig. 3, we demonstrate the normalized test throughput versus the radar test detection error for ISAC and SSAC. For the ISAC scheme, we vary a hyperparameter β dictating the relative weight in the design criterion in favor of communications; for SSAC we vary the fraction α of slots allocated to communications. As β increases, more priority is given by ISAC to communication over radar detection; and, similarly, as α increases, SSAC assigns more slots to communications. The performance of ISAC with an SNN having 10 hidden neurons is essentially independent of β for any 0.25< β <0.75. A first observation is that, for SSAC, there is a trade-off between communication and sensing performance levels caused by the slot allocation. A similar trade-off is also observed for ISAC when using an SNN with 6 hidden neurons. This is due to the limited capacity of the shared common hidden layer of the SNN. In contrast, when 10 hidden neurons are available at the SNN, ISAC is seen to optimize both data decoding and target sensing performance, obtaining significant gains over SSAC.
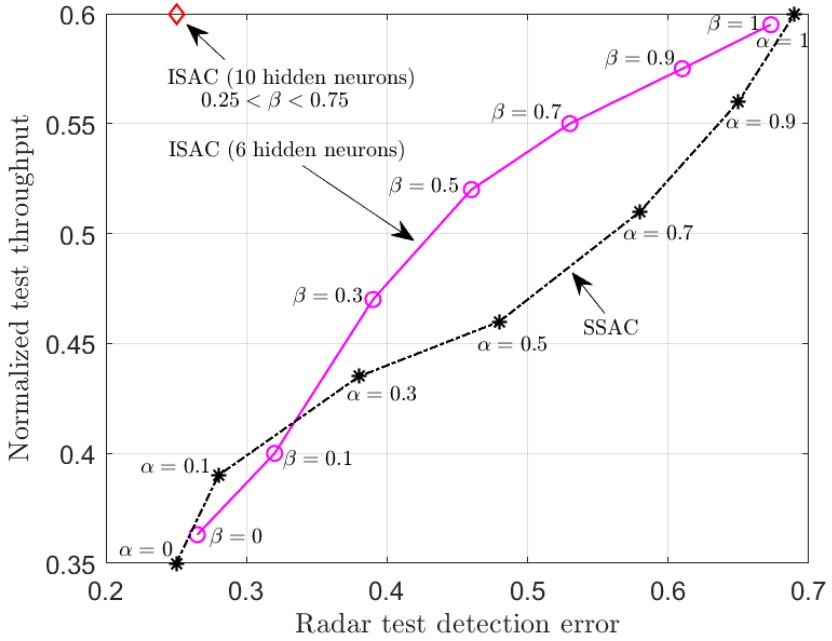
Fig. 3. Normalized test throughput versus radar test detection error for ISAC and SSAC.
Fig. 4 illustrates how the SNN receiver can leverage the temporal sparsity of the IR signals to enhance energy efficiency. In this regard, we recall that energy consumption in an SNN is essentially proportional to the number of spikes produced by the SNN, given extremely low idle energy of neuromorphic chips [8]. The top panel shows the transmitted IR signal consisting of two frames of transmitted signals, separated by an idle frame of duration of 20 slots. We observe that in the idle frame, the spike count is significantly reduced, showing that the neuromorphic receiver can adjust its energy consumption to the activity level of the transmitter.
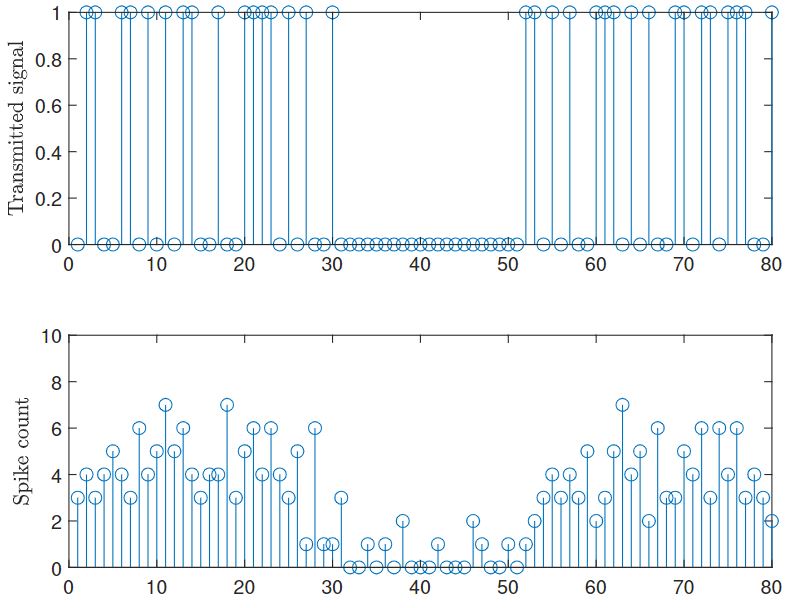
Fig. 4. Top: Transmitted signal consisting of two frames in which the transmitter is active separated by an idle frame. Bottom: Corresponding spike count for the SNN.
References
[1] S. Jeong, O. Simeone, A. Haimovich, and J. Kang, “Beamforming design for joint localization and data transmission in distributed antenna system,” IEEE Transactions on Vehicular Technology, vol. 64, no. 1, pp. 62–76, 2014.
[2] A. Nezirovic, A. G. Yarovoy, and L. P. Ligthart, “Signal processing for improved detection of trapped victims using UWB radar,” IEEE Transactions on Geoscience and Remote Sensing, vol. 48, no. 4, pp. 2005–2014, 2009.
[3] A. Mehonic and A. J. Kenyon, “Brain-inspired computing needs a master plan,” Nature, vol. 604, no. 7905, pp. 255–260, 2022.
[4] M . Davies, A. Wild, G. Orchard, Y. Sandamirskaya, G. A. F. Guerra, P. Joshi, P. Plank, and S. R. Risbud, “Advancing neuromorphic computing with Loihi: a survey of results and outlook,” Proceedings of the IEEE, vol. 109, no. 5, pp. 911–934, 2021.
[5] B. Rajendran, A. Sebastian, M. Schmuker, N. Srinivasa, and E. Eleftheriou, “Low-power neuromorphic hardware for signal processing applications: a review of architectural and system-level design approaches,” IEEE Signal Processing Magazine, vol. 36, no. 6, pp. 97–110, 2019.
[6] N. Skatchkovsky, H. Jang, and O. Simeone, “End-to-end learning of neuromorphic wireless systems for low-power edge artificial intelligence,” in Proc. Asilomar Conference on Signals, Systems, and Computers, pp. 166–173, 2020.
[7] J. Chen, N. Skatchkovsky, and O. Simeone, “Neuromorphic wireless cognition: event-driven semantic communications for remote inference,” arXiv preprint arXiv:2206.06047, 2022.
[8] M . Davies, N. Srinivasa, T.-H. Lin, G. Chinya, Y. Cao, S. H. Choday, G. Dimou, P. Joshi, N. Imam, S. Jain et al., “Loihi: A neuromorphic manycore processor with on-chip learning,” IEEE Micro, vol. 38, no. 1, pp. 82–99, 2018.
Recent Comments